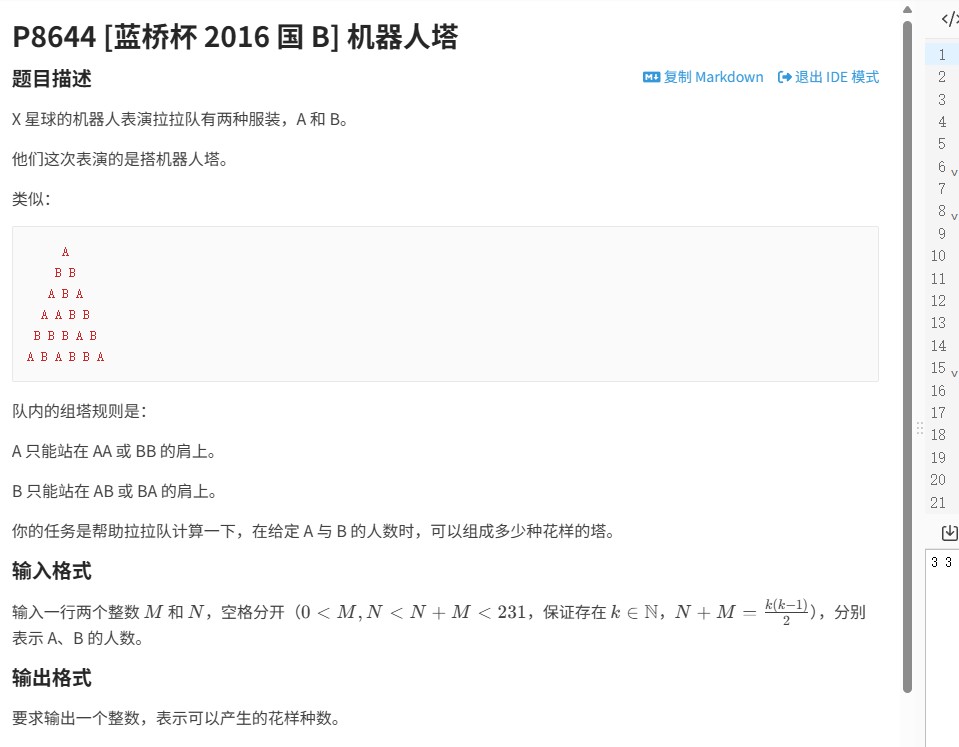
一、题目解读2016年蓝桥杯国赛B组的“机器人塔”问题(洛谷P8644)是一个典型的组合数学与动态规划结合的题目。题目要求构建一个由A和B两种机器人组成的金字塔结构,其中每一层的机器人数量递减,且相邻机器人需满足特定规则。用户需根据给定的总机器人数量M和B机器人数量N,计算符合条件的金字塔方案总数。题目难点在于如何高效枚举所有合法状态,并验证其可行性。 二、解题思路采用位运算与递推策略。首先,通过数学推导确定金字塔的总层数k(利用等差数列求和公式),若总机器人数无法构成完整金字塔则直接返回0。随后,利用二进制位掩码(bitmask)枚举底层所有可能的B机器人排列(用1表示B,0表示A),并通过逐层递推验证每一层的合法性: 每层机器人由下层相邻两个机器人合并生成:若下层相邻为相同类型,生成A;不同类型生成B。 若合并过程中剩余A/B数量不足,或层数验证不通过,则方案无效。 最终统计有效方案数。 三、解题步骤解析1. 计算总层数k:利用k*(k+1)/2与总机器人数比较,确定**合法层数。 2. 底层排列枚举:使用二进制掩码遍历所有2^k种排列,统计B数量验证边界条件。 3. 逐层递推验证: 初始化当前层为底层掩码,剩余A/B数量。 对每一层,从高位到低位遍历,根据相邻位状态生成下一层,并更新剩余数量。 若某层合并失败或剩余数量耗尽,标记方案无效。 4. 统计有效方案:当所有层验证通过且剩余数量为0时,累加方案数。 四、代码与注释
- #include <iostream>
- #include <vector>
- using namespace std;
- int count_bits(int x) { // 统计二进制中1的个数(即B数量)
- int cnt = 0;
- while (x) {
- cnt += x & 1;
- x >>= 1;
- }
- return cnt;
- }
- int main() {
- int M, N;
- cin >> M >> N;
-
- // 计算总层数k
- int total = M + N;
- int k = 1;
- while (k*(k+1)/2 < total) k++;
-
- if (k*(k+1)/2!= total) { // 层数不匹配直接退出
- cout << 0 << endl;
- return 0;
- }
- int ans = 0;
- // 枚举**层所有可能的排列
- for (int mask = 0; mask < (1 << k); mask++) {
- int a = 0, b = count_bits(mask); // 统计当前层A/B数量
- if (b > N || (k - b) > M) continue; // 超出边界跳过
-
- int valid = 1;
- int current = mask; // 当前层掩码
- int remain_a = M - (k - b); // 剩余A需生成
- int remain_b = N - b; // 剩余B需生成
-
- for (int layer = k-1; layer >= 1 && valid; layer--) {
- int next_layer = 0; // 下一层掩码
- int new_a = 0, new_b = 0;
-
- for (int i = 0; i < layer; i++) {
- bool left = current & (1 << i); // 左机器人
- bool right = current & (1 << (i+1)); // 右机器人
- if (left == right) { // 生成A
- if (remain_a <= 0) { valid = 0; break; }
- remain_a--;
- next_layer |= (0 << i); // 标记为A
- } else { // 生成B
- if (remain_b <= 0) { valid = 0; break; }
- remain_b--;
- next_layer |= (1 << i); // 标记为B
- }
- }
- current = next_layer; // 进入下一层
- }
-
- if (valid && remain_a == 0 && remain_b == 0) { // 全部生成成功
- ans++;
- }
- }
-
- cout << ans << endl;
- return 0;
- }
五、总结该解法巧妙利用位运算减少状态空间,结合递推思想高效验证金字塔结构。通过数学推导确定层数k,避免了暴力枚举所有排列的复杂度。代码中逐层合并逻辑清晰,利用二进制位直接操作相邻机器人状态,是解决此类组合问题的经典范例。理解该思路有助于提升动态规划与位运算的应用能力。
| 

 发表于 2025-8-15 15:43:28
发表于 2025-8-15 15:43:28